

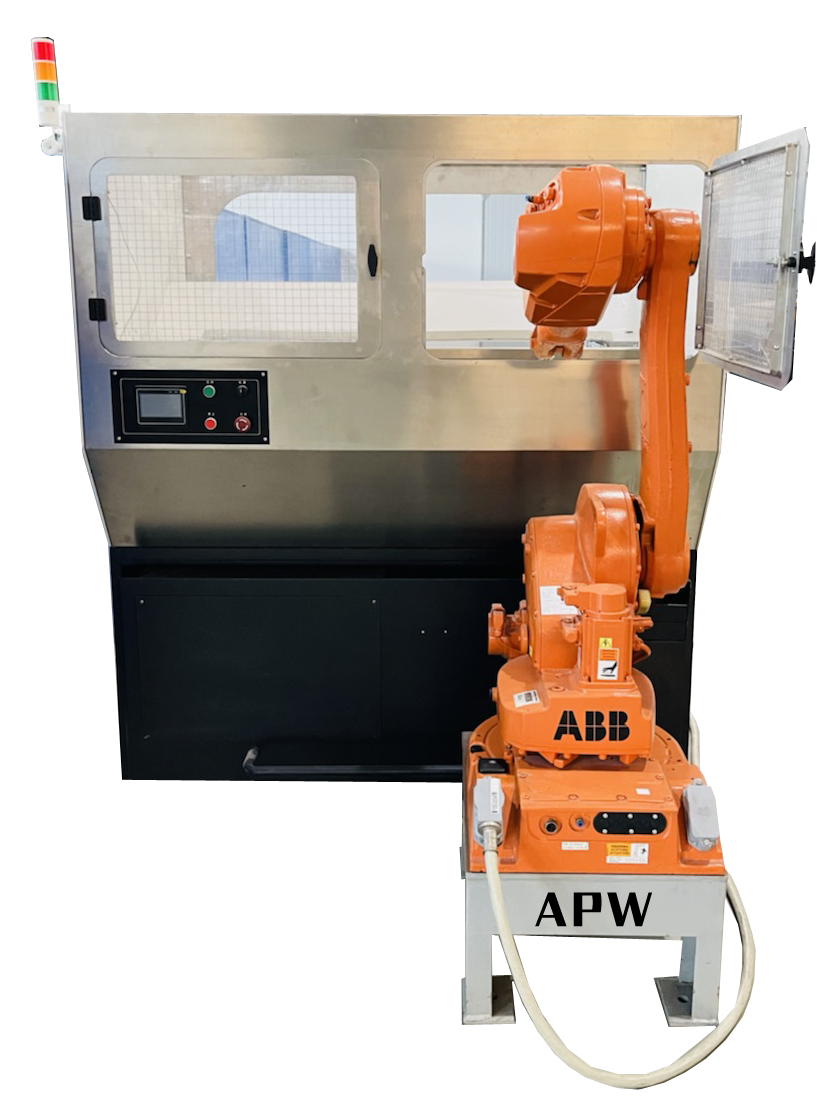
操作机是机器人手臂式水切割机机器人的执行机构,它由矩形框架、横臂的x方向运动、z轴的y方向运动、手抓夹持水枪的z方向运动和α、β两个手腕的旋转运动构成,XYZ三个直线运动合成它的包络空间的三维位置矢量,α、β,两个旋转运动完成手腕的姿态变化。
机器人的工作位置空间XYA三轴运动范围所包括的一个立方体,由于手腕α、β两轴的运动范围分别为0°~360°和0°~180°,加上其独特的结构特点----α、β轴两轴的几何中心线交于空间一点,因此它的姿态变化范围构成了空间一球体的上半部,球心即切割点,球半径就是水枪的有效长度加上有效切割距离。机器人工作时水流保持向下喷射,使水的收集变得容易,水被收集到移动工作台的水槽内。机器人电气控制系统是机器人的关键部分,电气控制系统的核心是机器人控制器,由它来控制机器人按预定的路径协调运动。
高压水切割机器人控制器由STD总工线工业计算机、伺服位置控制器、伺服速度控制系统、输入输出控制单元、强点操作单元。记忆存储单元、示教盒、操作界面和显示操作几部分组成。
机器人控制器为两级计算机多CPU控制,主CPU负责机器人系统任务调度、系统管理、运动学计算、轨迹插补运算和人机对话等工作伺服位置控制系统由5轴位置控制环组成,其任务是接收主机送来的位置数据,操作各轴伺服电机做预定的轨迹运动其与交流伺服驱动系统一起构成机器人运动控制系统。机器人在切割过程中没高压水喷射点运行轨迹是连续的,由机器人的5轴运动的合成来保证喷射点的位置和水枪姿态的准确度。
 首页
首页
 产品中心
产品中心
 电话咨询
电话咨询
 售后服务
售后服务 售前服务
售前服务 关注公众号
关注公众号