DMC-4080功能配置 (1)通讯配置 以太网是局域网,信息以数据包为单位进行传输。DMC-4080支持两种工业标准协议:TCP/IP和UDP/IP。控制器以所接收的协议格式进行相应的回应。 TCP/IP是一个“连接”协议。主站或客户端连接到从站或服务器,通过一系列数据包握手以便开始通讯。每个发送的数据包当被接受时会告知已收到。如果没有接受到告知回应,此信息被认为丢失,会被自动重发。 UDP/IP不需要“连接”。如果信息丢失,控制器不返回冒号或问号。由于此协议本身不提供关于丢失数据的保护,因此,发送方必须自己重发数据包。UDP/IP有较少的开销,带来更高的吞吐量,用UDP连接,不必重新连接到控制器。 DH指令控制DMC-4080使用动态地址或静态地址,如果控制器被设置为DH1(默认),且网络中有一个DHCP服务器,控制器将被从服务器自动分配一个IP地址。如果设置为DHO,会阻止从服务器分配地址给控制器。DMC-4080允许用户直接指定控制器的地址,控制器本身提供IA指令用于输入要分配的IP地址。IA指令只有在DH设置为0时有效。 尽管UDP/IP协议的数据传输效率高、应用也更简单,但TCP/IP协议可以保证通讯更为可靠。因此本文使用TCP/IP协议,DH设置为0并用IA192,168,0,100给控制器分配静态地址192,168,0,100 0 (2)脉冲指令输出配置
控制器为每轴提供脉冲/方向信号(STP+, STP-, DIR+, DIR-)输出,这些输出一般用于连接外部驱动器,控制步进电机或工作在位置模式下的伺服电机。绝大部分电机驱动器均可接收脉冲/方向信号,对于这样的驱动器,只需使用屏蔽双绞线将控制器与电机驱动器上的STP+, STP-, DIR+, DIR一对应连接即可。DMC-4080提供MT命令用于选择电机类型及驱动信号的极性。本文用MT1,1,1,1,1指令指定各轴电机为正极性伺服电机。
(3)放大器使能配置
DMC-4080提供电机放大器的使能控制器信号-AEN,使能信号在以下条件下改变:
·发送了电机关断指令MO或看门狗定时器启动
" OE指令(错误报警关断使能)被设置,位置误差超过了误差极限(通过ER设置)
·到达限位开关
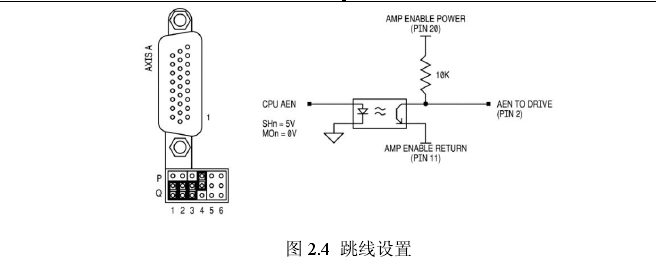
DMC-4080提供的放大器使能方式有:高电平放大器使能(HAEN、低电平放大器使能(LAEN ) , 5 V逻辑、 12V逻辑、24V的外部电源等。每轴放大器使能电路可通过跳线分别设置的,每个不同配置的跳线设置和电路图如图2.4所不。
本文通过如图2.4所示的跳线,设置各轴放大器使能为外部电源、低电平放大器使能。DMC-4080提供SH, MO指令用来控制使能信号的输出,MO关断放大器使能、SH使放大器使能。放大器一旦使能,就可发送Galil指令控制电机运动。 (4)编码器信号输入配置 主编码器输入可配置为正交(默认)或脉冲/方向输入。标为MA+, MA-,MB+, MB-,负输入(MA-, MB-)是编码器输入的差分输入。当编码器设置为脉冲/方向输入,MA通道则是脉冲输入,MB通道是方向输入。 DMC-4080提供CE指令用于配置接收编码器类型。本文通过CES指令将接收编码器类型配置为脉冲+方向型。 2. 3. 2 DMC-4080运动控制功能分析 DMC-4080提供了多种运动方式,包括JOG运动、独立定位、位置跟踪、含角度跟踪的平面矢量插补、轨迹方式、多维直线插补运动。本节将对这些运动控制方式及其功能进行分析比较,并选择满足本系统五轴联动控制功能的运动控制功能。 (1)JOG运动 该运动功能为单步运动(点动方式),在该运方式下,能够根据需要指定运动的速度、加速度和方向。该运动方式通过速度控制,没有定位要求,以ST指令停止运动。只需对各轴指定JOG速度、加速度和减速度,对应轴就会以此速度一直运动直到有停止命令ST使其停止,运动方向由速度参数的符号决定。 (2)独立定位 独立定位包括绝对位置运动和相对位置运动,绝对位置运动给定的是各轴坐标点,相对位置运动给定的是各轴的增量距离。两种独立定位运动中各轴的绝对位置或相对位置、速度、加速度、减速度相互独立互不影响,各轴按照程序中所规定的运动轨迹完成各自的定位控制。 (3)位置跟踪 对于一些应用如卫星跟踪、导弹跟踪、镜子或透镜的随机打磨或需要在未完成运动时改变终点的任何应用都需要跟踪一个目标位置,控制器必须朝着目标行进,并能在运动中改变目标位置。在跟踪应用中,目标位置改变可发生在运动中的任意时间,或以有规律的预定的时间间隔o DMC-4080控制器用位置跟踪模式支持此类型运动,此模式允许在运动过程中有计划的或随机的更新当前绝对目标位置。根据新目标位置,控制器继续朝其运动方向继续运行,或改变运动方向,或减速停止。给出的新目标位置可与当前目标位置为同一方向,或与当前目标位置为相反方向。控制器会根据新目标位置、已设置的加速度、加速度和速度来计算生成新运动轨迹。 (4)含角度跟踪的平面矢量插补 对于雕刻、给缝之类由圆弧和线段组成的二维运动,可以使用DMC-4080控制器的含角度跟踪的平面矢量插补功能完成上述运动,在直线和圆弧的连接处,也是以矢量插补的方式进行。DMC-4080执行含角度跟踪的平面矢量插补的同时,PC机软件部分可以执行其他任务。含角度跟踪的平面矢量插补运动功能,可以选择任意两个轴构成平面矢量插补运动,且在任何时候,只能为联动轴指定任意两个轴构成二维矢量运动。 此外,也能对第三轴进行控制。如玻璃切割、石材切割,这类应用需要刀片轴的角度与加工轨迹保持相切,为此,DMC-4080控制器使刀片轴(第三轴)做为角度跟随轴,使其与选择的两轴运动保持角度跟随关系。 (5)轨迹方式 DMC-4080控制器提供轨迹模式,此模式能够在1-8轴内定义任意位置一时间曲线,从而跟踪由计算机产生的轨迹如抛物线、螺旋线或其他形式的轨迹。此功能对轨迹类别无限制,轨迹长度无限。其轨迹用位置增量加以描述,用指令CD指定位置增量,DT指定时间间隔。控制器在指定的位置增量之间进行直线插补,并且每个采样周期内给出一个坐标点。对于DMC-4080默认的TM1000,采样周期为lms,即在DT定义的时间间隔内每隔lms产生一个插补点。 C6)多维直线插补 DMC-4080控制器提供2轴到8轴多维直线插补功能。在该运动控制方式下,各轴按给定的目标轨迹以矢量速度、矢量加速度或矢量减速度联动;并根据各轴的增量位移生成运动轨迹。在连续的多维直线插补运动中,可以给定无数的增量位移,以便多维直线插补方式完全跟随给定的目标轨迹。DMC-4080提供LM指令用于指定插补轴,指令LI来指定各轴的增量运动距离,使用多维直线插补结束指令LE来指定多维直线插补运动程序结束,此指令告诉控制器减速停止在最后一条LI指令之后。 本文要实现的加工方式为空间三维加工,要求的运动方式为五轴联动。上述运动控制方式中:JOG运动方式给定速度和方向并不能指定加工位置,且各轴之间不能实现联动;独立定位方式中各轴的位置、速度、加速度、减速度相互独立互不相关,不能形成联动;位置跟踪方式跟踪的是绝对目标位置,属于绝对定位模式亦不能形成联动;含角度跟踪的平面矢量插补方式其功能被限制在平面上的二维加工,且最多三轴联动;轨迹方式其实质是直线插补运动,在指定位置增量的同时需指定时间间隔;多维直线插补方式提供多达八轴的联动,指定联动轴,给定增量距离、矢量速度、矢量加速度、矢量减速度各轴既能沿规定的轨迹联动。综上,选取多维直线插补为本系统的五轴联动控制方式。


 首页
首页
 产品中心
产品中心
 电话咨询
电话咨询
 售后服务
售后服务 售前服务
售前服务 关注公众号
关注公众号